San Francisco
On New Year's Eve I was at a murder mystery party in Brooklyn. On January 1st I was in an Uber on my way to SFO.
My SF Airbnb had a furnace in the hallway and hot water that lasted a few minutes at a time. When the month was up, instead of renewing, I found a hacker house on Google Maps, got a tour, and signed up the next day.
It ended up being a great decision. Picture a gorgeous San Francisco Victorian with big bay windows, high ceilings, and light everywhere. A communal table where on any given Tuesday you'd find someone training a model, someone whiteboarding a difficult problem, someone putting together a new robotic prototype.

Snapshot of my SF year: Pickleball on lunch breaks, working out of a new co-working space every day, weekends at hackathons, either competing or co-working with vibes. I worked out of the offices of the teams building my favorite products, like Replicate in the Mission, which hosted lunch on Wednesdays for devs to come hang out.
Running Events
Here's a hack for running events in San Francisco.
Step 1: Co-run an event with your hacker house. About 1,500 people get added to your personal Luma list.
Step 2: Join a co-working space where members can book rooms automatically through the Luma plugin. Both SF co-working spaces I joined in 2026 had this set up.
Step 3: Run your event.
Highlight Reel
The year started with AI Build Jam at The Commons. People showed up with startup ideas, developed hypotheses, and created testable prototypes by end of day. It was run simultaneously in SF and Montreal.

Rachel and I dropped into Montreal remotely for the team pic
The Solid hackathon was the first time anyone had placed an Ikea catering order at the SF Ikea. We carted trays across the street, ran health challenges in the raffle (one ticket for a sit-to-stand with no hands, two for submitting on time), and followed it up with a ProductHunt launch party on the rooftop with a cereal bar, live demos.

Solid "Vibe Labs" volunteers (or, friends from Boston)

Demoing the " Vibe Labs Gallery " - a gallery and project submission page created for the Solid hackathon, generated with Solid
The Vibe Olympics started as a throwaway idea. I wanted to create a real competition, something that had clear 'win' gates that had nothing to do with how some judge felt about a project. I beta tested the concept in the hacker house: a group of us wrote features on pieces of paper and put them in a pile. Then, 5 were randomly selected, and a timer was set for ten minutes to see who could ship a live app with the most features complete. It was a blast, and a month later I had partnered with the incredible Dex and the event was in full production in Frontier Tower's basement robot fighting ring.


Building AI Agents Workshop
Sponsored by Hugging Face, Rime, and Codapt, 150 people at Frontier Tower.

The pitch: Building AI agents is fun, easy, and can be free. Don't pay for [insert agent product here]. We'll set up a local model and write Python to automate the things that zap your brainpower.
The workshop took participants from zero to multi-agent systems in one afternoon. Using smolagents as a framework, we started with a basic agent, then moved on to custom tools, MCP connections, multi-service integration (Notion + image generation), multi-agent teams with specialized roles, custom Gradio web interfaces, and finally web navigation with Selenium.
We hooked an agent up to a robot arm and had it mix mocktails. The drink_making_agent.py was the highlight of the repo and the afternoon.
The room spanned complete beginners to senior engineers, and watching them pair up and help each other was the best part. Hugging Face launched a Women on Hugging Face community afterward and invited our participants as founding members. Rime gave everyone $100 in credits.

Workshop code: github.com/ltejedor/building-ai-agents
CVPR AI Art Gallery
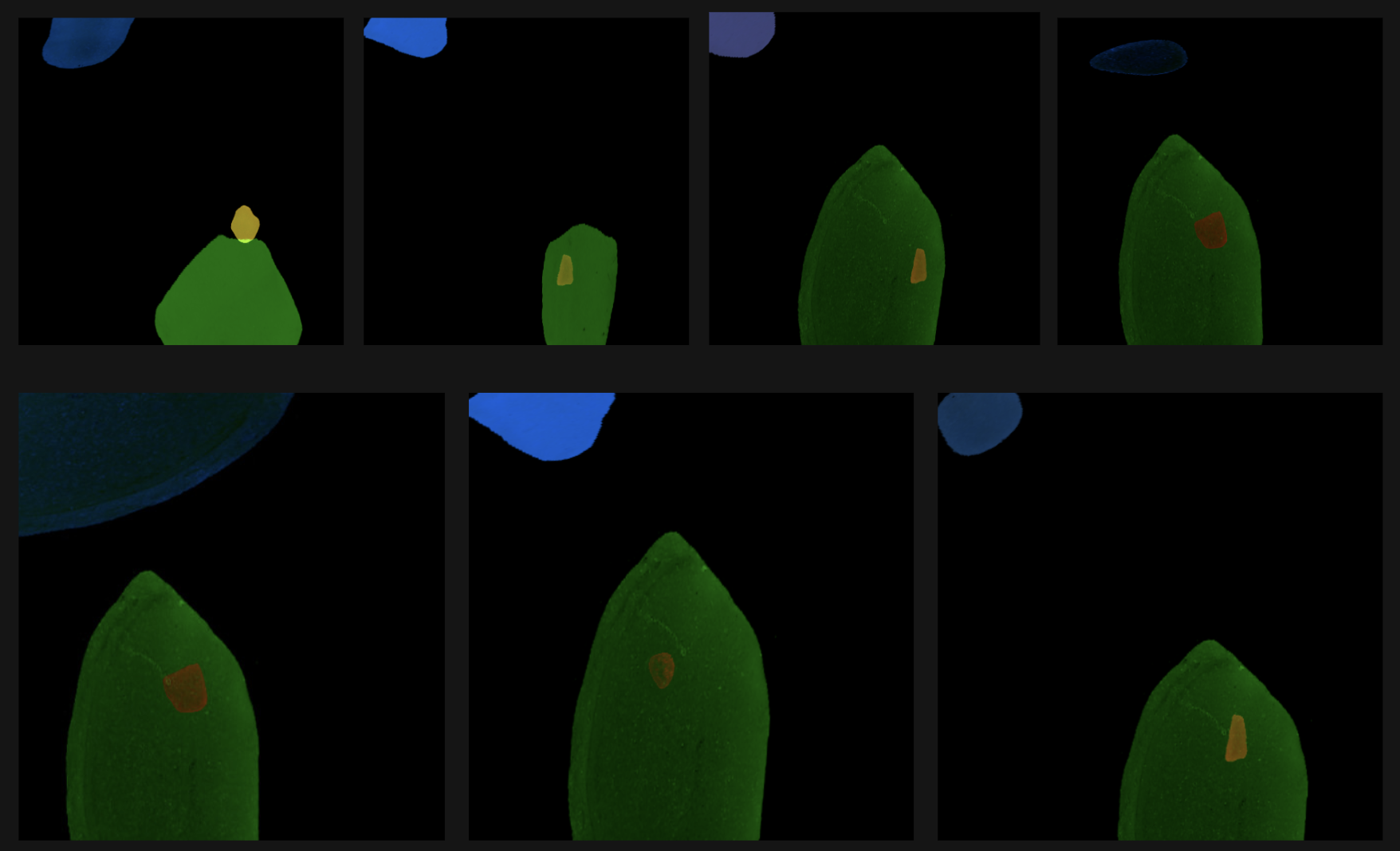
In 2025, my work was featured at the CVPR AI Art Gallery. The piece was The Meaning of, Mirror, a self-portrait composed from optimized image brushes.

"The Meaning of, Mirror" self portrait on the right

Diffusion models work at the pixel level, generating images from noise. Instead of generating pixels, what if the system placed real images, such as photographs, textures, organic forms as "brushes" on a canvas, and used gradient descent to optimize their arrangement?
Think of it like this. You have a box of transparent photographs: leaves, tree bark, light through water. You scatter them on a table. Then slowly you start sliding them around, overlapping them, rotating them, adjusting their opacity. With enough patience, a face emerges from the leaves. That's exactly what the system does, except the patience is mathematical. Neural visual grammars and dual CLIP-based encoders minimize the perceptual distance between the current arrangement and the target, iterating through gradient descent, optimizing each brush's position, scale, color, and rotation until a portrait resolves.
'A house on a hill' generated with as few elements as possible.
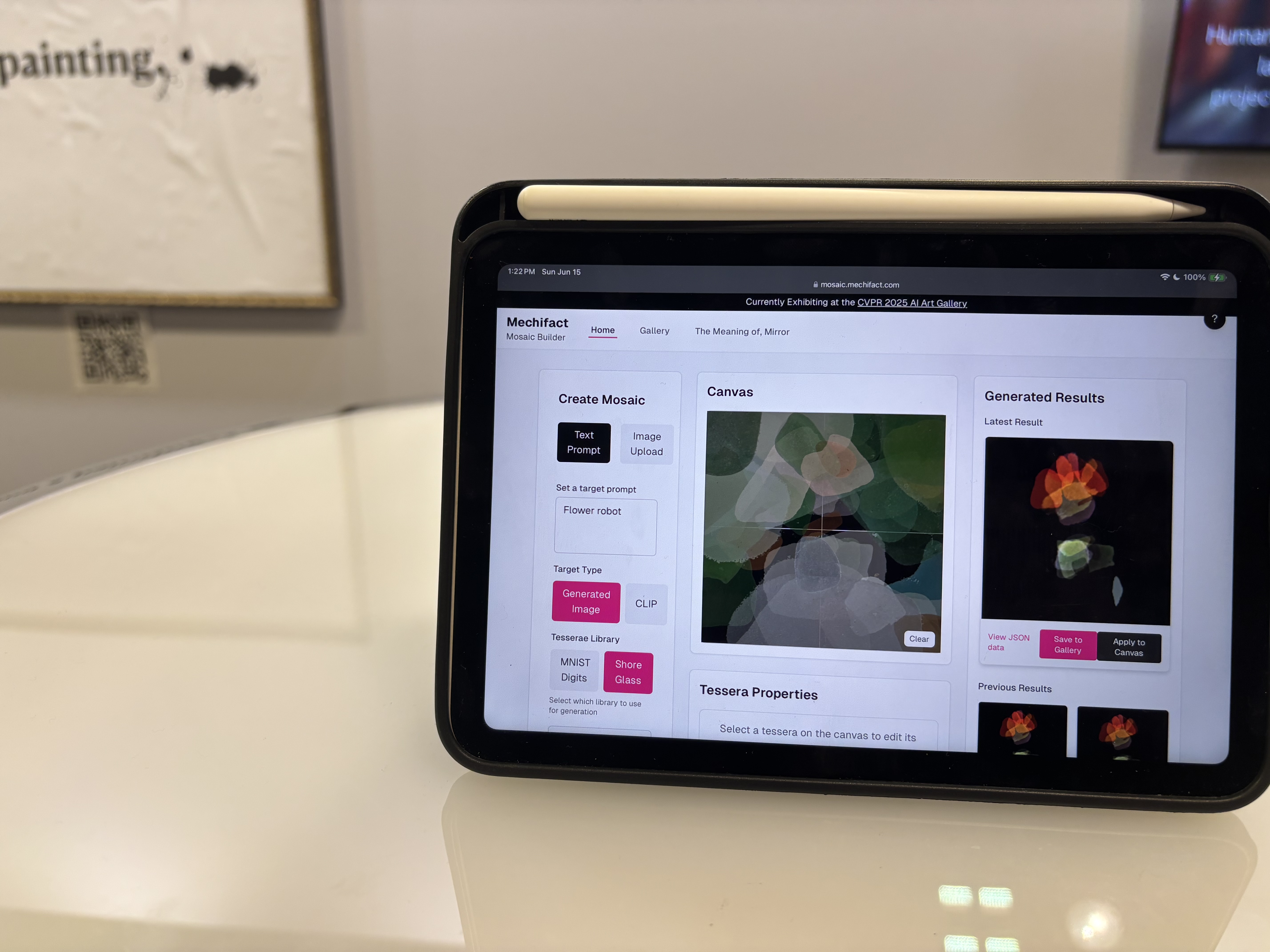
I also built an interactive version so CVPR attendees could create their own work with the same system. They chose brushes, watched the optimization run, stepped in to adjust, or stepped back to let it continue.

Jellyfish generated by visitors at the CVPR gallery
The moon breaking apart, another visitor creation using the interactive Mosaic Builder
→ Deep dive into the technical details behind the piece
Embodied Agents
Projects this year that explored embodied AI, AI models operating in physical space.
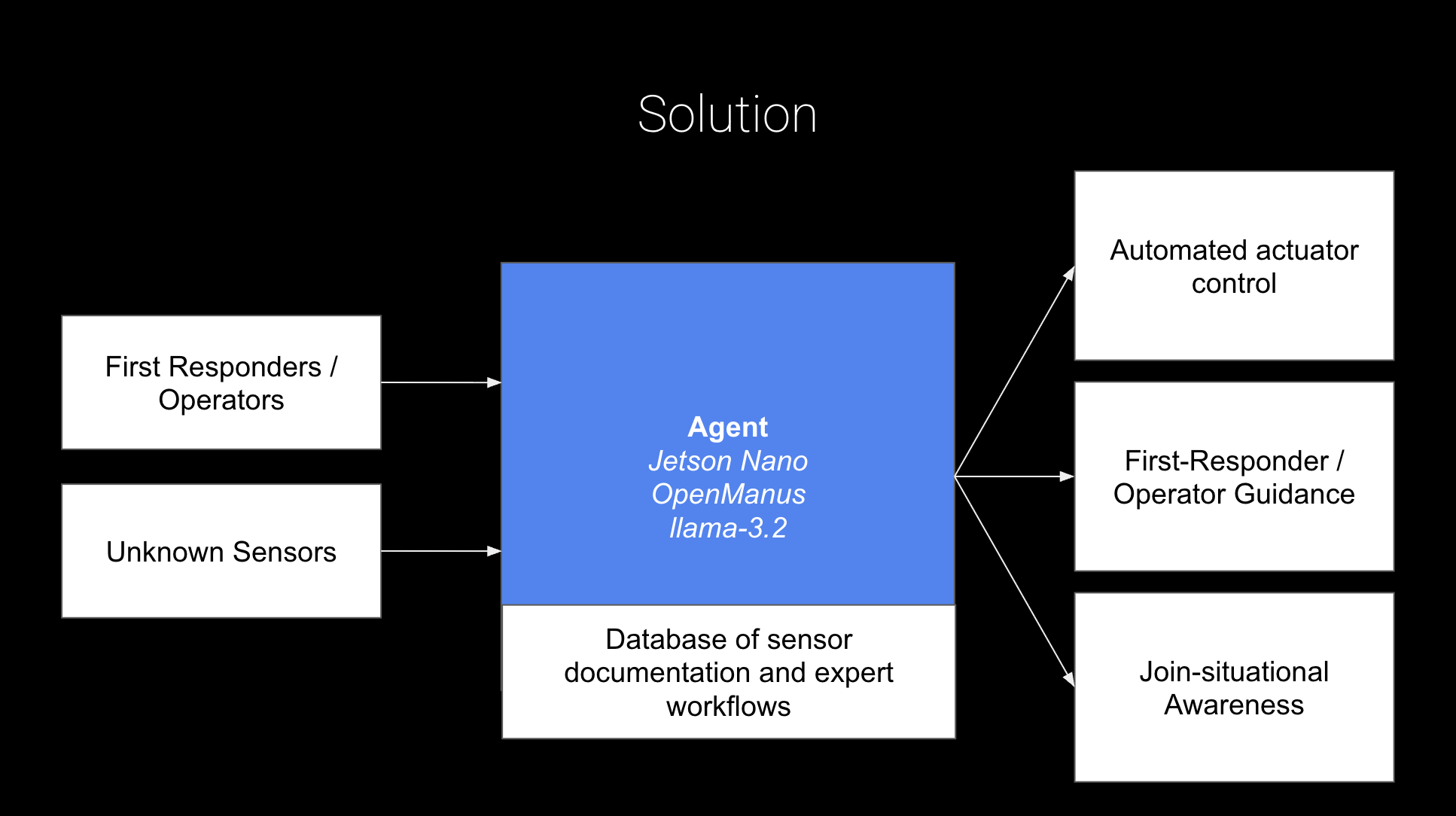
Offline agents for disaster response
In a disconnected disaster zone, there are sensors everywhere — temperature, humidity, sonar, motion — but nobody has time to configure integrations when the situation is urgent. Can AI agents auto-discover and connect to hardware with zero setup?
What I built: Jetson Nano as the brain, ESP-32s wired to ultrasonic and raindrop sensors, MCP for standardized sensor discovery, and a fork of OpenManus running entirely offline. Plug in a new sensor, the agent discovers it, auto-generates an MCP tool definition, and starts visualizing the room autonomously.
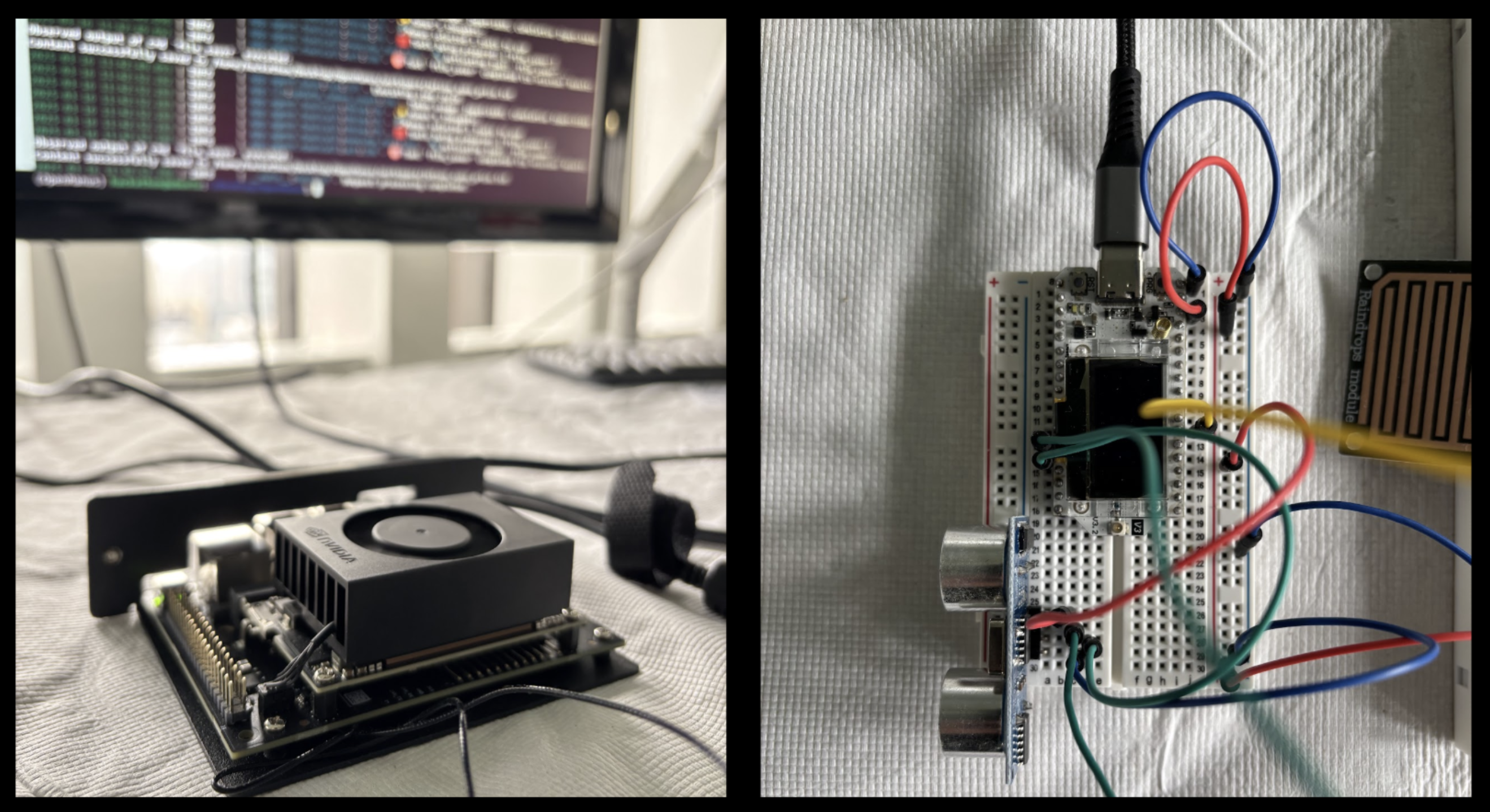
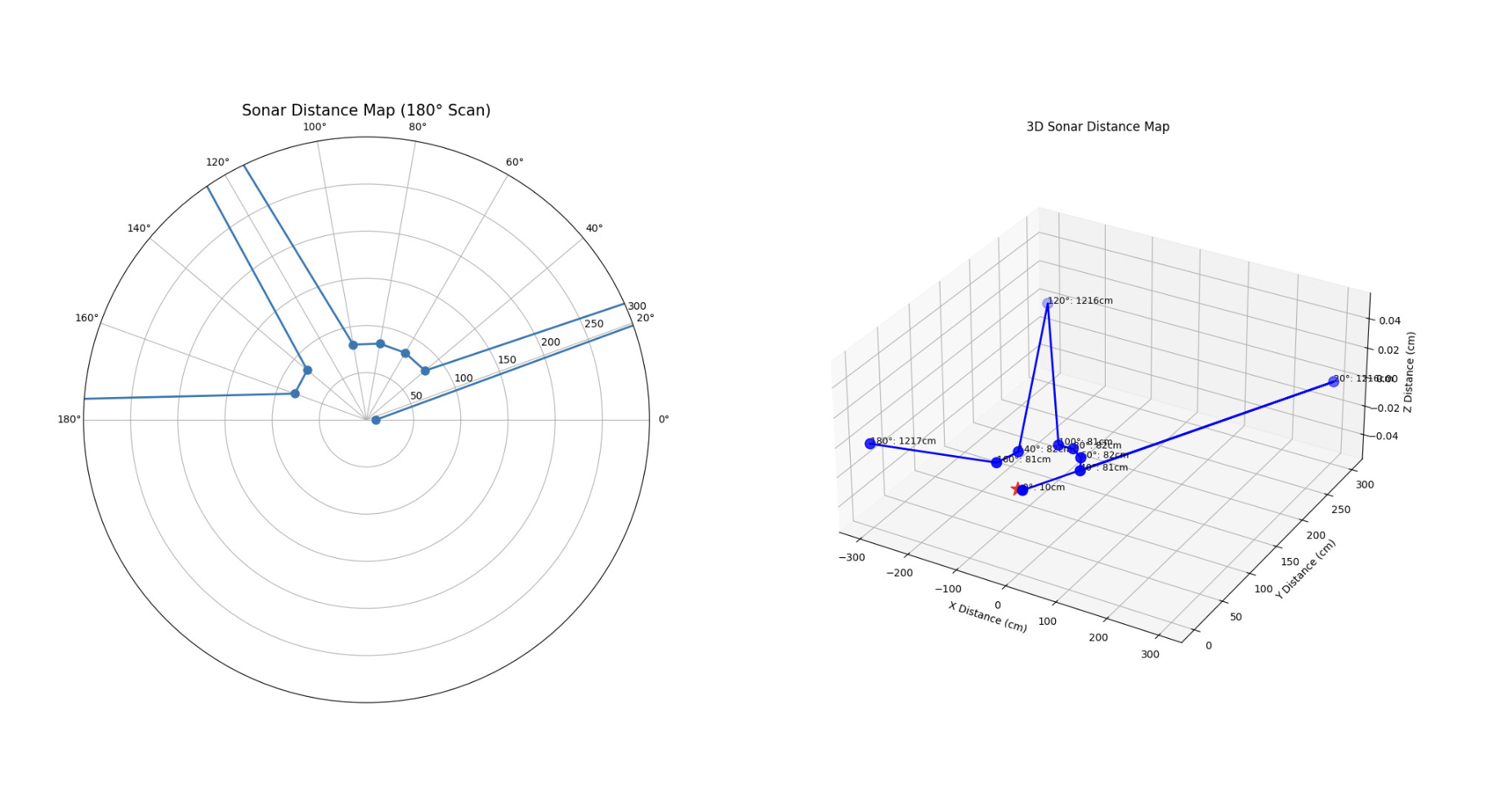
Visualization of the room, created offline and autonomously by Embodied Open Manus with previously unknown sensors
Code: github.com/ltejedor/embodied-openmanus
Training robot designs with physics
I explored whether an LLM could learn to design robots purely through physics simulation — no examples of good designs, just trial and error.
I fine-tuned DeepSeek-R1 with LoRA adapters to generate robot designs in SDF, then piped them straight into the Gazebo physics simulator. The simulator was the only teacher. If the design didn't collapse or error out, +1. If it did, -1. Feed that reward back through GRPO, let the model try again. The whole loop ran on Strong Compute's distributed infrastructure using FSDP.
The key insight: I never defined what a "good" robot looks like. I just asked whether each design could survive contact with physics.

Code: github.com/ltejedor/deepseek-training-with-simulation
Decentralized identity for robot swarms
What happens when you have thousands of robots accomplishing something together? How do you track them? Distribute training across them?
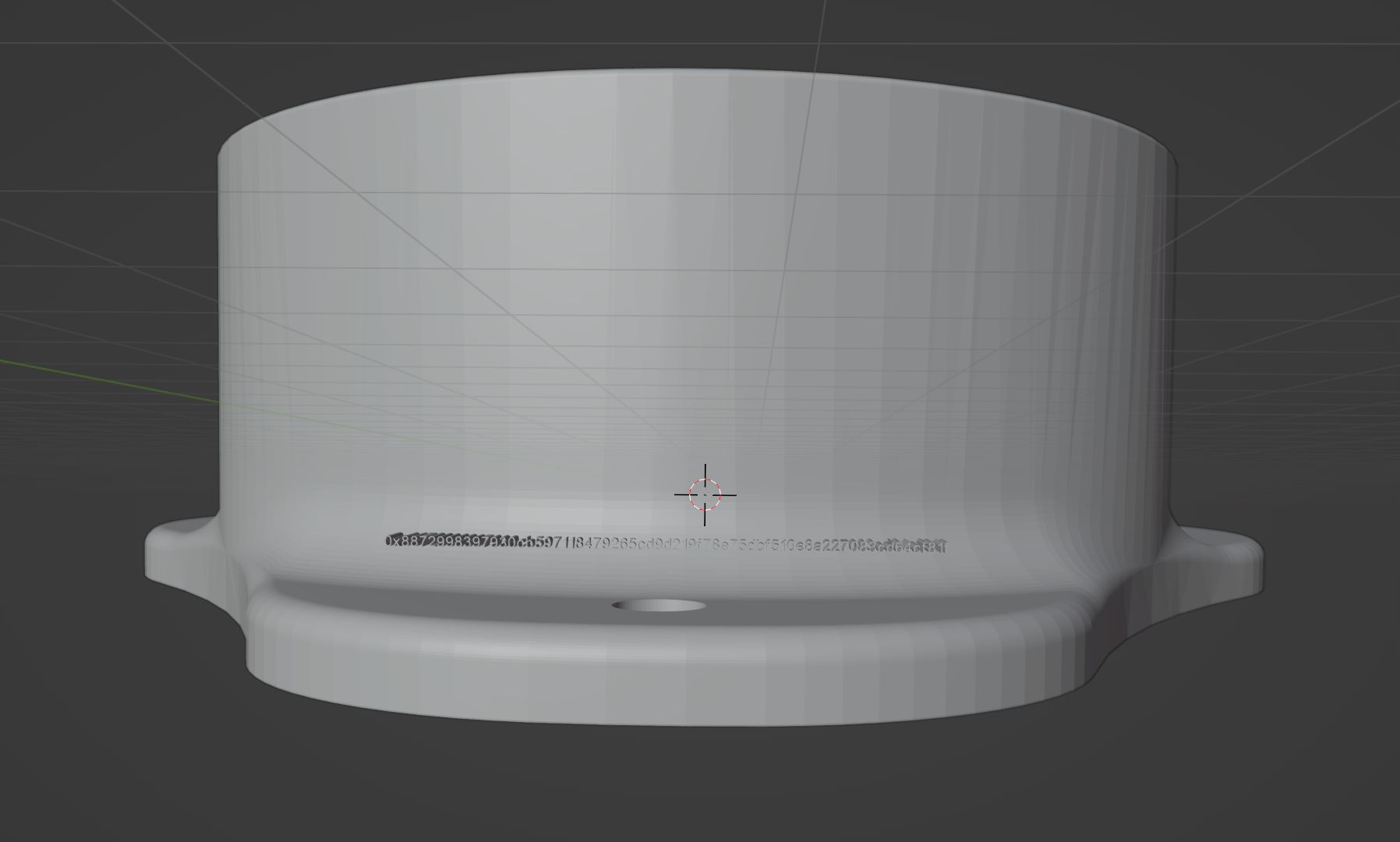
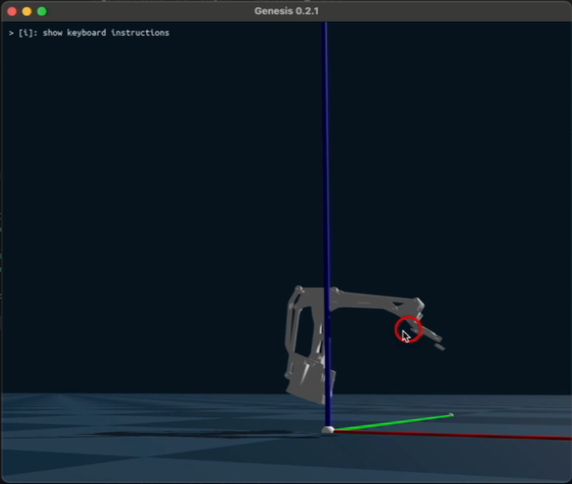
I built a decentralized identity and training system that unifies physical robots and their simulated digital twins. A new robot embodiment is registered on Arbitrum blockchain. Then, the system generates a digital twin using Roboforge (CAD to URDF conversion) for simulation in the Genesis physics engine. When register a physical instance of that embodiment, the blockchain transaction hash gets physically embedded into the 3D model using PyVista before printing, embossing the robot's on-chain identity onto its body.
Code: github.com/ltejedor/sepiol_storage
30 Days of Agents
In May, I posted on Bluesky: "hey #buildinpublic, what are you using ai agents for rn?" Crickets. So I said: really, no one? alright, let's do this. For the next 30 days, a new AI agent workflow, every day, open source.
The highlights: a WhatsApp bot that sent haunted glitchy messages in group chats. The first FigJam MCP server.
The FigJam MCP server in action — an agent creating and manipulating a FigJam board
Other daily AI Agent experiments:
A proof-of-work system for AI agents with knowledge graph visualizations (see below).
A self-assembling agent that scours ML leaderboards to find the best model for each task.
A 3D environment, inspired by Sonic's Chao Garden, where you can walk around and interact with AI agents in real space, interrupt their runs with live feedback, and watch them work (Winner of Rime's prize at the AWS MCP and A2A Hackathon).
Mechifact (from days 18-19) — tracing agent steps, tool calls, and token usage through knowledge graphs and timelines
30 Days of Agents Site: agents.mechifact.com | Code: github.com/ltejedor/agents
→ Tutorial: building on what I learned during the challenge
Thanks to Megha, Daniela, Rachel, Trevor, Riley, Sahas, Katie, the TTB cohort, and many others for an inspiring 2025.